สไลด์โชว์ ฝีมือนักวิจัยไทย! “มือเทียมกลสวมแขนสั่งการหยิบจับได้ด้วยสัญญาณไฟฟ้ากล้ามเนื้อ” สิ่งประดิษฐ์เพิ่มคุณภาพชีวิตผู้พิการ
-
 ฝีมือนักวิจัยไทย! “มือเทียมกลสวมแขนสั่งการหยิบจับได้ด้วยสัญญาณไฟฟ้ากล้ามเนื้อ” สิ่งประดิษฐ์เพิ่มคุณภาพชีวิตผู้พิการฝีมือนักวิจัยไทย! “มือเทียมกลสวมแขนสั่งการหยิบจับได้ด้วยสัญญาณไฟฟ้ากล้ามเนื้อ” สิ่งประดิษฐ์เพิ่มคุณภาพชีวิตผู้พิการ
ฝีมือนักวิจัยไทย! “มือเทียมกลสวมแขนสั่งการหยิบจับได้ด้วยสัญญาณไฟฟ้ากล้ามเนื้อ” สิ่งประดิษฐ์เพิ่มคุณภาพชีวิตผู้พิการฝีมือนักวิจัยไทย! “มือเทียมกลสวมแขนสั่งการหยิบจับได้ด้วยสัญญาณไฟฟ้ากล้ามเนื้อ” สิ่งประดิษฐ์เพิ่มคุณภาพชีวิตผู้พิการ -
![[/p]
[b]“หุ่นยนต์ต้นแบบมือเทียมกลสวมแขนสำหรับคนพิการแขนขาดบริเวณกึ่งกลางปลายแขนโดยใช้สัญญาณอิเล็กโทรมิโอแกรมและเทคนิคปัญญาประดิษฐ์”[/b] หนึ่งในความก้าวหน้าของการพัฒนา “มือเทียมกล” เพื่อช่วยเหลือผู้ที่มีความพิการทางมือ ที่ได้รับผลกระทบต่อการเคลื่อนไหว การใช้ชีวิตและประกอบอาชีพต่างๆ และยังส่งผลกระทบต่อสภาพจิตใจ โดยผลงานสิ่งประดิษฐ์นี้ เป็นของนักวิจัยไทยทีได้รับรางวัล JDIE Grand Award ซึ่งเป็นรางวัลสูงสุดของงานจากงานประกวดสิ่งประดิษฐ์และนวัตกรรมระดับนานาชาติในเวที Japan Design, Idea and Invention Expo 2024 และ เหรียญทองจากสำนักงานการวิจัยแห่งชาติ (วช.) ณ Tokyo Ariake Garden Convention Center กรุงโตเกียว ประเทศญี่ปุ่น เมื่อเดือนกรกฎาคม 2567 ที่ผ่านมา
[b]ดร.ฐิตาภรณ์ กนกรัตน อาจารย์ประจำภาควิชาคณิตศาสตร์ คณะวิทยาศาสตร์ มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี (มจธ.)[/b] ในฐานะหัวหน้าโครงการ กล่าวว่า งานวิจัยนี้เริ่มพัฒนาขึ้นมาเมื่อปี 2566 มีเป้าหมายเบื้องต้นคือ การนำองค์ความรู้ด้าน Internet of Things (IoT), Machine Learning (การเรียนรู้ด้วยเครื่อง) และ AI (ปัญญาประดิษฐ์) มาสร้าง “หุ่นยนต์ต้นแบบมือเทียมกลสวมแขน” ที่จะทำให้คนพิการที่แขนขาดตั้งแต่ใต้ข้อศอกลงไป มีอวัยวะเทียมที่ช่วยในการหยิบ จับ สิ่งของได้ ช่วยให้ทำกิจวัตรประจำวันต่างๆ ใกล้เคียงกับมือจริงๆ โดยใช้ “สัญญาณไฟฟ้ากล้ามเนื้อ”
ฝีมือนักวิจัยไทย! “มือเทียมกลสวมแขนสั่งการหยิบจับได้ด้วยสัญญาณไฟฟ้ากล้ามเนื้อ” สิ่งประดิษฐ์เพิ่มคุณภาพชีวิตผู้พิการ]([/p
วช.
ปัญญาประดิษฐ์
/images/upload/2024-11-22-575-1-02.2.jpg) ฝีมือนักวิจัยไทย! “มือเทียมกลสวมแขนสั่งการหยิบจับได้ด้วยสัญญาณไฟฟ้ากล้ามเนื้อ” สิ่งประดิษฐ์เพิ่มคุณภาพชีวิตผู้พิการ[/p] [b]“หุ่นยนต์ต้นแบบมือเทียมกลสวมแขนสำหรับคนพิการแขนขาดบริเวณกึ่งกลางปลายแขนโดยใช้สัญญาณอิเล็กโทรมิโอแกรมและเทคนิคปัญญาประดิษฐ์”[/b] หนึ่งในความก้าวหน้าของการพัฒนา “มือเทียมกล” เพื่อช่วยเหลือผู้ที่มีความพิการทางมือ ที่ได้รับผลกระทบต่อการเคลื่อนไหว การใช้ชีวิตและประกอบอาชีพต่างๆ และยังส่งผลกระทบต่อสภาพจิตใจ โดยผลงานสิ่งประดิษฐ์นี้ เป็นของนักวิจัยไทยทีได้รับรางวัล JDIE Grand Award ซึ่งเป็นรางวัลสูงสุดของงานจากงานประกวดสิ่งประดิษฐ์และนวัตกรรมระดับนานาชาติในเวที Japan Design, Idea and Invention Expo 2024 และ เหรียญทองจากสำนักงานการวิจัยแห่งชาติ (วช.) ณ Tokyo Ariake Garden Convention Center กรุงโตเกียว ประเทศญี่ปุ่น เมื่อเดือนกรกฎาคม 2567 ที่ผ่านมา [b]ดร.ฐิตาภรณ์ กนกรัตน อาจารย์ประจำภาควิชาคณิตศาสตร์ คณะวิทยาศาสตร์ มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี (มจธ.)[/b] ในฐานะหัวหน้าโครงการ กล่าวว่า งานวิจัยนี้เริ่มพัฒนาขึ้นมาเมื่อปี 2566 มีเป้าหมายเบื้องต้นคือ การนำองค์ความรู้ด้าน Internet of Things (IoT), Machine Learning (การเรียนรู้ด้วยเครื่อง) และ AI (ปัญญาประดิษฐ์) มาสร้าง “หุ่นยนต์ต้นแบบมือเทียมกลสวมแขน” ที่จะทำให้คนพิการที่แขนขาดตั้งแต่ใต้ข้อศอกลงไป มีอวัยวะเทียมที่ช่วยในการหยิบ จับ สิ่งของได้ ช่วยให้ทำกิจวัตรประจำวันต่างๆ ใกล้เคียงกับมือจริงๆ โดยใช้ “สัญญาณไฟฟ้ากล้ามเนื้อ” ฝีมือนักวิจัยไทย! “มือเทียมกลสวมแขนสั่งการหยิบจับได้ด้วยสัญญาณไฟฟ้ากล้ามเนื้อ” สิ่งประดิษฐ์เพิ่มคุณภาพชีวิตผู้พิการ
ฝีมือนักวิจัยไทย! “มือเทียมกลสวมแขนสั่งการหยิบจับได้ด้วยสัญญาณไฟฟ้ากล้ามเนื้อ” สิ่งประดิษฐ์เพิ่มคุณภาพชีวิตผู้พิการ[/p] [b]“หุ่นยนต์ต้นแบบมือเทียมกลสวมแขนสำหรับคนพิการแขนขาดบริเวณกึ่งกลางปลายแขนโดยใช้สัญญาณอิเล็กโทรมิโอแกรมและเทคนิคปัญญาประดิษฐ์”[/b] หนึ่งในความก้าวหน้าของการพัฒนา “มือเทียมกล” เพื่อช่วยเหลือผู้ที่มีความพิการทางมือ ที่ได้รับผลกระทบต่อการเคลื่อนไหว การใช้ชีวิตและประกอบอาชีพต่างๆ และยังส่งผลกระทบต่อสภาพจิตใจ โดยผลงานสิ่งประดิษฐ์นี้ เป็นของนักวิจัยไทยทีได้รับรางวัล JDIE Grand Award ซึ่งเป็นรางวัลสูงสุดของงานจากงานประกวดสิ่งประดิษฐ์และนวัตกรรมระดับนานาชาติในเวที Japan Design, Idea and Invention Expo 2024 และ เหรียญทองจากสำนักงานการวิจัยแห่งชาติ (วช.) ณ Tokyo Ariake Garden Convention Center กรุงโตเกียว ประเทศญี่ปุ่น เมื่อเดือนกรกฎาคม 2567 ที่ผ่านมา [b]ดร.ฐิตาภรณ์ กนกรัตน อาจารย์ประจำภาควิชาคณิตศาสตร์ คณะวิทยาศาสตร์ มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี (มจธ.)[/b] ในฐานะหัวหน้าโครงการ กล่าวว่า งานวิจัยนี้เริ่มพัฒนาขึ้นมาเมื่อปี 2566 มีเป้าหมายเบื้องต้นคือ การนำองค์ความรู้ด้าน Internet of Things (IoT), Machine Learning (การเรียนรู้ด้วยเครื่อง) และ AI (ปัญญาประดิษฐ์) มาสร้าง “หุ่นยนต์ต้นแบบมือเทียมกลสวมแขน” ที่จะทำให้คนพิการที่แขนขาดตั้งแต่ใต้ข้อศอกลงไป มีอวัยวะเทียมที่ช่วยในการหยิบ จับ สิ่งของได้ ช่วยให้ทำกิจวัตรประจำวันต่างๆ ใกล้เคียงกับมือจริงๆ โดยใช้ “สัญญาณไฟฟ้ากล้ามเนื้อ” ฝีมือนักวิจัยไทย! “มือเทียมกลสวมแขนสั่งการหยิบจับได้ด้วยสัญญาณไฟฟ้ากล้ามเนื้อ” สิ่งประดิษฐ์เพิ่มคุณภาพชีวิตผู้พิการ -
![[/p]
ดร.ฐิตาภรณ์ อธิบายว่า สัญญาณไฟฟ้ากล้ามเนื้อ (Electromyography/EMG) คือความต่างศักย์ไฟฟ้าของกล้ามเนื้อที่เกิดจากระดับเกร็งของเส้นใยกล้ามเนื้อส่วนนั้นๆ ในระดับต่างๆ สั่งงานโดยเซลล์ประสาท ผ่านกระแสประสาทมายังเส้นใยกล้ามเนื้อ โดยสัญญาณไฟฟ้ากล้ามเนื้อจะมีรูปแบบและระดับสัญญาณที่แตกต่างกันตามลักษณะการเคลื่อนไหวและระดับความแรงที่สมองของเจ้าของอวัยวะสั่งการ ซึ่งหากสามารถตรวจวัดและวิเคราะห์สัญญาณไฟฟ้ากล้ามเนื้อที่เกิดขึ้นในช่วงเวลานั้นๆ ได้อย่างถูกต้อง มือเทียมก็จะสามารถขยับหรือเคลื่อนไหวได้ตรงหรือใกล้เคียงกับคำสั่งที่มาจากสมองของคนพิการคนนั้น
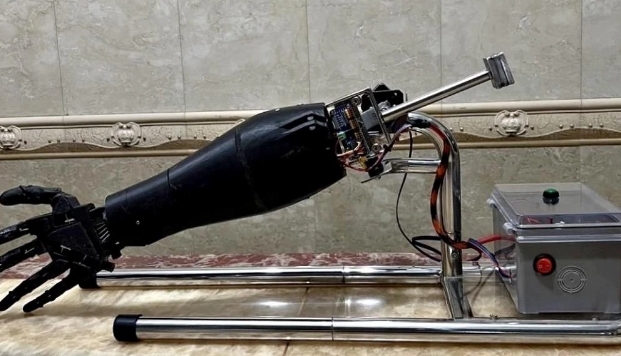
[b] “สิ่งที่เราทำก็คือ การนำเซนเซอร์ตรวจจับสัญญาณไฟฟ้า มาติดบริเวณปลายแขนของคนพิการมือที่เข้าร่วมโครงการวิจัย และนำตัวเลขที่ได้มาเป็นข้อมูล แล้วใช้ Machine Learning วิเคราะห์และตีความสัญญาณนั้นออกมา โดยเริ่มจากการกระบวนการกรองให้สัญญาณไฟฟ้าของแต่ละคำสั่งการเคลื่อนไหว มีความแม่นยำมากที่สุดก่อน ซึ่งเป็นเป็นจุดเด่นของงานนี้ เพราะอัลกอริทึม (Algorithm)* ที่เราพัฒนาขึ้น ทำให้ Machine Leaning สามารถคัดแยกสัญญาณได้อย่างถูกต้องแม่นยำกว่าเทคโนโลยีที่มีอยู่ในตลาดปัจจุบัน ทำให้ AI สามารถเรียนรู้และสั่งการมือกลให้เคลื่อนไหวในท่าทางที่ถูกต้องยิ่งขึ้น ขณะที่มือเทียมกลที่เราพัฒนาขึ้นมีจุดเด่นคือ เป็นวัสดุคอมโพสิทที่มีน้ำหนักเบาและใช้การขึ้นรูปด้วยเครื่อง 3D Print ทำให้มีต้นทุนการผลิตต่ำ (ประมาณ 5,000 บาท/ชิ้น) และง่ายต่อการซ่อมแซม เพราะโครงสร้างส่วนใดแตกหักหรือเสียหายก็สามารถพิมพ์ชิ้นใหม่มาใส่แทนได้”[/b]
ฝีมือนักวิจัยไทย! “มือเทียมกลสวมแขนสั่งการหยิบจับได้ด้วยสัญญาณไฟฟ้ากล้ามเนื้อ” สิ่งประดิษฐ์เพิ่มคุณภาพชีวิตผู้พิการ]([/p
Electromyography/EMG
ประมาณ 5,000 บาท/ชิ้น
/images/upload/2024-11-22-575-2-02.3.jpg) ฝีมือนักวิจัยไทย! “มือเทียมกลสวมแขนสั่งการหยิบจับได้ด้วยสัญญาณไฟฟ้ากล้ามเนื้อ” สิ่งประดิษฐ์เพิ่มคุณภาพชีวิตผู้พิการ[/p] ดร.ฐิตาภรณ์ อธิบายว่า สัญญาณไฟฟ้ากล้ามเนื้อ (Electromyography/EMG) คือความต่างศักย์ไฟฟ้าของกล้ามเนื้อที่เกิดจากระดับเกร็งของเส้นใยกล้ามเนื้อส่วนนั้นๆ ในระดับต่างๆ สั่งงานโดยเซลล์ประสาท ผ่านกระแสประสาทมายังเส้นใยกล้ามเนื้อ โดยสัญญาณไฟฟ้ากล้ามเนื้อจะมีรูปแบบและระดับสัญญาณที่แตกต่างกันตามลักษณะการเคลื่อนไหวและระดับความแรงที่สมองของเจ้าของอวัยวะสั่งการ ซึ่งหากสามารถตรวจวัดและวิเคราะห์สัญญาณไฟฟ้ากล้ามเนื้อที่เกิดขึ้นในช่วงเวลานั้นๆ ได้อย่างถูกต้อง มือเทียมก็จะสามารถขยับหรือเคลื่อนไหวได้ตรงหรือใกล้เคียงกับคำสั่งที่มาจากสมองของคนพิการคนนั้น [b] “สิ่งที่เราทำก็คือ การนำเซนเซอร์ตรวจจับสัญญาณไฟฟ้า มาติดบริเวณปลายแขนของคนพิการมือที่เข้าร่วมโครงการวิจัย และนำตัวเลขที่ได้มาเป็นข้อมูล แล้วใช้ Machine Learning วิเคราะห์และตีความสัญญาณนั้นออกมา โดยเริ่มจากการกระบวนการกรองให้สัญญาณไฟฟ้าของแต่ละคำสั่งการเคลื่อนไหว มีความแม่นยำมากที่สุดก่อน ซึ่งเป็นเป็นจุดเด่นของงานนี้ เพราะอัลกอริทึม (Algorithm)* ที่เราพัฒนาขึ้น ทำให้ Machine Leaning สามารถคัดแยกสัญญาณได้อย่างถูกต้องแม่นยำกว่าเทคโนโลยีที่มีอยู่ในตลาดปัจจุบัน ทำให้ AI สามารถเรียนรู้และสั่งการมือกลให้เคลื่อนไหวในท่าทางที่ถูกต้องยิ่งขึ้น ขณะที่มือเทียมกลที่เราพัฒนาขึ้นมีจุดเด่นคือ เป็นวัสดุคอมโพสิทที่มีน้ำหนักเบาและใช้การขึ้นรูปด้วยเครื่อง 3D Print ทำให้มีต้นทุนการผลิตต่ำ (ประมาณ 5,000 บาท/ชิ้น) และง่ายต่อการซ่อมแซม เพราะโครงสร้างส่วนใดแตกหักหรือเสียหายก็สามารถพิมพ์ชิ้นใหม่มาใส่แทนได้”[/b] ฝีมือนักวิจัยไทย! “มือเทียมกลสวมแขนสั่งการหยิบจับได้ด้วยสัญญาณไฟฟ้ากล้ามเนื้อ” สิ่งประดิษฐ์เพิ่มคุณภาพชีวิตผู้พิการ
ฝีมือนักวิจัยไทย! “มือเทียมกลสวมแขนสั่งการหยิบจับได้ด้วยสัญญาณไฟฟ้ากล้ามเนื้อ” สิ่งประดิษฐ์เพิ่มคุณภาพชีวิตผู้พิการ[/p] ดร.ฐิตาภรณ์ อธิบายว่า สัญญาณไฟฟ้ากล้ามเนื้อ (Electromyography/EMG) คือความต่างศักย์ไฟฟ้าของกล้ามเนื้อที่เกิดจากระดับเกร็งของเส้นใยกล้ามเนื้อส่วนนั้นๆ ในระดับต่างๆ สั่งงานโดยเซลล์ประสาท ผ่านกระแสประสาทมายังเส้นใยกล้ามเนื้อ โดยสัญญาณไฟฟ้ากล้ามเนื้อจะมีรูปแบบและระดับสัญญาณที่แตกต่างกันตามลักษณะการเคลื่อนไหวและระดับความแรงที่สมองของเจ้าของอวัยวะสั่งการ ซึ่งหากสามารถตรวจวัดและวิเคราะห์สัญญาณไฟฟ้ากล้ามเนื้อที่เกิดขึ้นในช่วงเวลานั้นๆ ได้อย่างถูกต้อง มือเทียมก็จะสามารถขยับหรือเคลื่อนไหวได้ตรงหรือใกล้เคียงกับคำสั่งที่มาจากสมองของคนพิการคนนั้น [b] “สิ่งที่เราทำก็คือ การนำเซนเซอร์ตรวจจับสัญญาณไฟฟ้า มาติดบริเวณปลายแขนของคนพิการมือที่เข้าร่วมโครงการวิจัย และนำตัวเลขที่ได้มาเป็นข้อมูล แล้วใช้ Machine Learning วิเคราะห์และตีความสัญญาณนั้นออกมา โดยเริ่มจากการกระบวนการกรองให้สัญญาณไฟฟ้าของแต่ละคำสั่งการเคลื่อนไหว มีความแม่นยำมากที่สุดก่อน ซึ่งเป็นเป็นจุดเด่นของงานนี้ เพราะอัลกอริทึม (Algorithm)* ที่เราพัฒนาขึ้น ทำให้ Machine Leaning สามารถคัดแยกสัญญาณได้อย่างถูกต้องแม่นยำกว่าเทคโนโลยีที่มีอยู่ในตลาดปัจจุบัน ทำให้ AI สามารถเรียนรู้และสั่งการมือกลให้เคลื่อนไหวในท่าทางที่ถูกต้องยิ่งขึ้น ขณะที่มือเทียมกลที่เราพัฒนาขึ้นมีจุดเด่นคือ เป็นวัสดุคอมโพสิทที่มีน้ำหนักเบาและใช้การขึ้นรูปด้วยเครื่อง 3D Print ทำให้มีต้นทุนการผลิตต่ำ (ประมาณ 5,000 บาท/ชิ้น) และง่ายต่อการซ่อมแซม เพราะโครงสร้างส่วนใดแตกหักหรือเสียหายก็สามารถพิมพ์ชิ้นใหม่มาใส่แทนได้”[/b] ฝีมือนักวิจัยไทย! “มือเทียมกลสวมแขนสั่งการหยิบจับได้ด้วยสัญญาณไฟฟ้ากล้ามเนื้อ” สิ่งประดิษฐ์เพิ่มคุณภาพชีวิตผู้พิการ -
![[/p]
ในส่วนของความคืบหน้าการพัฒนาหุ่นยนต์ต้นแบบมือเทียมกลสวมแขนฯ นั้น ดร.ฐิตาภรณ์ กล่าวว่า ขณะนี้หุ่นยนต์มือเทียมกล สามารถทำตามคำสั่ง “กำ” “แบนิ้วมือ” “หมุนข้อมือ” รวมถึงการหยิบ จับ และยกวัตถุที่มีขนาดพอเหมาะกับมือกลต้นแบบ เช่น ถ้วยกาแฟ หรือขวดที่มีขนาดเล็ก ได้ตามคำสั่งของเจ้าของมือแล้ว ซึ่งความท้าทายต่อจากนี้คือ การให้หุ่นยนต์มือกลแสดงท่าทางของนิ้ว เช่น การชูนิ้ว หรือการหยิบจับทั่วไปให้ได้หลากหลายขึ้น ซึ่งการจะทำให้นิ้วของหุ่นยนต์ทำงานได้ใกล้เคียงกับมือมนุษย์นั้น คือการทำให้อัลกอริทึมได้รู้เรียนรู้สัญญาณไฟฟ้ากล้ามเนื้อในปริมาณที่มากขึ้น เพื่อให้สามารถลดขนาดขนาดสัญญาณ และกำจัดสัญญาณรบกวนได้ดีขึ้น ที่จะทำให้ AI สามารถจำแนกสัญญาณไฟฟ้ากล้ามเนื้อ เป็นการเคลื่อนไหวที่จำเพาะ และหลากหลายขึ้น
ฝีมือนักวิจัยไทย! “มือเทียมกลสวมแขนสั่งการหยิบจับได้ด้วยสัญญาณไฟฟ้ากล้ามเนื้อ” สิ่งประดิษฐ์เพิ่มคุณภาพชีวิตผู้พิการ]([/p
ในส่วนของความคืบหน้าการพัฒนาหุ่นยนต์ต้นแบบมือเทียมกลสวมแขนฯ นั้น ดร.ฐิตาภรณ์ กล่าวว่า ขณะนี้หุ่นยนต์มือเทียมกล สามารถทำตามคำสั่ง “กำ” “แบนิ้วมือ” “หมุนข้อมือ” รวมถึงการหยิบ จับ และยกวัตถุที่มีขนาดพอเหมาะกับมือกลต้นแบบ เช่น ถ้วยกาแฟ หรือขวดที่มีขนาดเล็ก ได้ตามคำสั่งของเจ้าของมือแล้ว ซึ่งความท้าทายต่อจากนี้คือ การให้หุ่นยนต์มือกลแสดงท่าทางของนิ้ว เช่น การชูนิ้ว หรือการหยิบจับทั่วไปให้ได้หลากหลายขึ้น ซึ่งการจะทำให้นิ้วของหุ่นยนต์ทำงานได้ใกล้เคียงกับมือมนุษย์นั้น คือการทำให้อัลกอริทึมได้รู้เรียนรู้สัญญาณไฟฟ้ากล้ามเนื้อในปริมาณที่มากขึ้น เพื่อให้สามารถลดขนาดขนาดสัญญาณ และกำจัดสัญญาณรบกวนได้ดีขึ้น ที่จะทำให้ AI สามารถจำแนกสัญญาณไฟฟ้ากล้ามเนื้อ เป็นการเคลื่อนไหวที่จำเพาะ และหลากหลายขึ้น
/images/upload/2024-11-22-575-3-02.4.jpg) ฝีมือนักวิจัยไทย! “มือเทียมกลสวมแขนสั่งการหยิบจับได้ด้วยสัญญาณไฟฟ้ากล้ามเนื้อ” สิ่งประดิษฐ์เพิ่มคุณภาพชีวิตผู้พิการ[/p] ในส่วนของความคืบหน้าการพัฒนาหุ่นยนต์ต้นแบบมือเทียมกลสวมแขนฯ นั้น ดร.ฐิตาภรณ์ กล่าวว่า ขณะนี้หุ่นยนต์มือเทียมกล สามารถทำตามคำสั่ง “กำ” “แบนิ้วมือ” “หมุนข้อมือ” รวมถึงการหยิบ จับ และยกวัตถุที่มีขนาดพอเหมาะกับมือกลต้นแบบ เช่น ถ้วยกาแฟ หรือขวดที่มีขนาดเล็ก ได้ตามคำสั่งของเจ้าของมือแล้ว ซึ่งความท้าทายต่อจากนี้คือ การให้หุ่นยนต์มือกลแสดงท่าทางของนิ้ว เช่น การชูนิ้ว หรือการหยิบจับทั่วไปให้ได้หลากหลายขึ้น ซึ่งการจะทำให้นิ้วของหุ่นยนต์ทำงานได้ใกล้เคียงกับมือมนุษย์นั้น คือการทำให้อัลกอริทึมได้รู้เรียนรู้สัญญาณไฟฟ้ากล้ามเนื้อในปริมาณที่มากขึ้น เพื่อให้สามารถลดขนาดขนาดสัญญาณ และกำจัดสัญญาณรบกวนได้ดีขึ้น ที่จะทำให้ AI สามารถจำแนกสัญญาณไฟฟ้ากล้ามเนื้อ เป็นการเคลื่อนไหวที่จำเพาะ และหลากหลายขึ้น ฝีมือนักวิจัยไทย! “มือเทียมกลสวมแขนสั่งการหยิบจับได้ด้วยสัญญาณไฟฟ้ากล้ามเนื้อ” สิ่งประดิษฐ์เพิ่มคุณภาพชีวิตผู้พิการ
ฝีมือนักวิจัยไทย! “มือเทียมกลสวมแขนสั่งการหยิบจับได้ด้วยสัญญาณไฟฟ้ากล้ามเนื้อ” สิ่งประดิษฐ์เพิ่มคุณภาพชีวิตผู้พิการ[/p] ในส่วนของความคืบหน้าการพัฒนาหุ่นยนต์ต้นแบบมือเทียมกลสวมแขนฯ นั้น ดร.ฐิตาภรณ์ กล่าวว่า ขณะนี้หุ่นยนต์มือเทียมกล สามารถทำตามคำสั่ง “กำ” “แบนิ้วมือ” “หมุนข้อมือ” รวมถึงการหยิบ จับ และยกวัตถุที่มีขนาดพอเหมาะกับมือกลต้นแบบ เช่น ถ้วยกาแฟ หรือขวดที่มีขนาดเล็ก ได้ตามคำสั่งของเจ้าของมือแล้ว ซึ่งความท้าทายต่อจากนี้คือ การให้หุ่นยนต์มือกลแสดงท่าทางของนิ้ว เช่น การชูนิ้ว หรือการหยิบจับทั่วไปให้ได้หลากหลายขึ้น ซึ่งการจะทำให้นิ้วของหุ่นยนต์ทำงานได้ใกล้เคียงกับมือมนุษย์นั้น คือการทำให้อัลกอริทึมได้รู้เรียนรู้สัญญาณไฟฟ้ากล้ามเนื้อในปริมาณที่มากขึ้น เพื่อให้สามารถลดขนาดขนาดสัญญาณ และกำจัดสัญญาณรบกวนได้ดีขึ้น ที่จะทำให้ AI สามารถจำแนกสัญญาณไฟฟ้ากล้ามเนื้อ เป็นการเคลื่อนไหวที่จำเพาะ และหลากหลายขึ้น ฝีมือนักวิจัยไทย! “มือเทียมกลสวมแขนสั่งการหยิบจับได้ด้วยสัญญาณไฟฟ้ากล้ามเนื้อ” สิ่งประดิษฐ์เพิ่มคุณภาพชีวิตผู้พิการ